Conception, realisation and control of an autonomous 4-T-foils foiler system
The Mobula Project
This research initiative has been supported and funded by :
A flying boat ?
The idea of using a lifting wing with a dissymmetrical profile has, of course, triggered the early development
of aviation but has also been rapidly tested in a denser fluid: water. The first occurrence of this usage is from
1861 when Thomas Moy experimented with a towed structure featuring three lifting underwater surfaces.
He observed the lift and drag reduction effects and their relation to flow velocity (Monsonnec, 2020). The
regulation of the lifting effect, still a key question, was originally addressed with the use of self-regulated static
structures such as "ladder," "V," "L," "J," or "Y" shapes, where the lifting effect decreases as the immersed
part of the foiling structure reduces. However, these static structures are suboptimal as they produce inner
forces and require structural elements that induce supplementary drag. Hence, the 'T' foil is considered the
optimal structure, but requires active regulation. This challenge can be addressed by employing a 'frontal
sensor wand' that adjusts the foil's attack angle through a passive elastic transmission, as seen in the Moth
hydrofoiler (Day et al., 2019). As size and performance objectives increased, the need for electronic control
became evident. A fisrt approach involves regulating the incidence of a double-flap stern foil to control
altitude and pitch, with a passive foiling structure installed at the bow (Sang-Hyun and Hiroyuki, 2004;
AlaviMehr et al., 2016), activated when the boat velocity reached a prescribed value. Another approach
consists in using fixed foils at stern and regulating double-flap bow foils (Zong et al., 2019). The control
objective of these latest references was to reduce the vertical acceleration of the vessel in rough seas, as
shown in (Esteban et al., 2000), or to decrease the wet surface area (Suastika et al., 2022), thereby reducing
boat resistance by up to 30% when the position and profile of the foil are optimized with respect to boat
dynamics (Shen et al., 2022). Achieving full regulation of attainable degrees of freedom, including altitude
above water, roll, and pitch, while accommodating different velocities, requires, at least, the regulation of the
angle of attack of three independent foiling structures (Hörberg and Lundgren, 2023). Recently, considerable
effort has been made on the question of optimizing the foil profile using a CFD approach to maximize the
lifting effect while minimizing the drag component, as shown in (Rayhan et al., 2023), or to actuate the
surface with an oscillatory behavior as an efficient thrust mean in waves (Lopes et al., 2023).
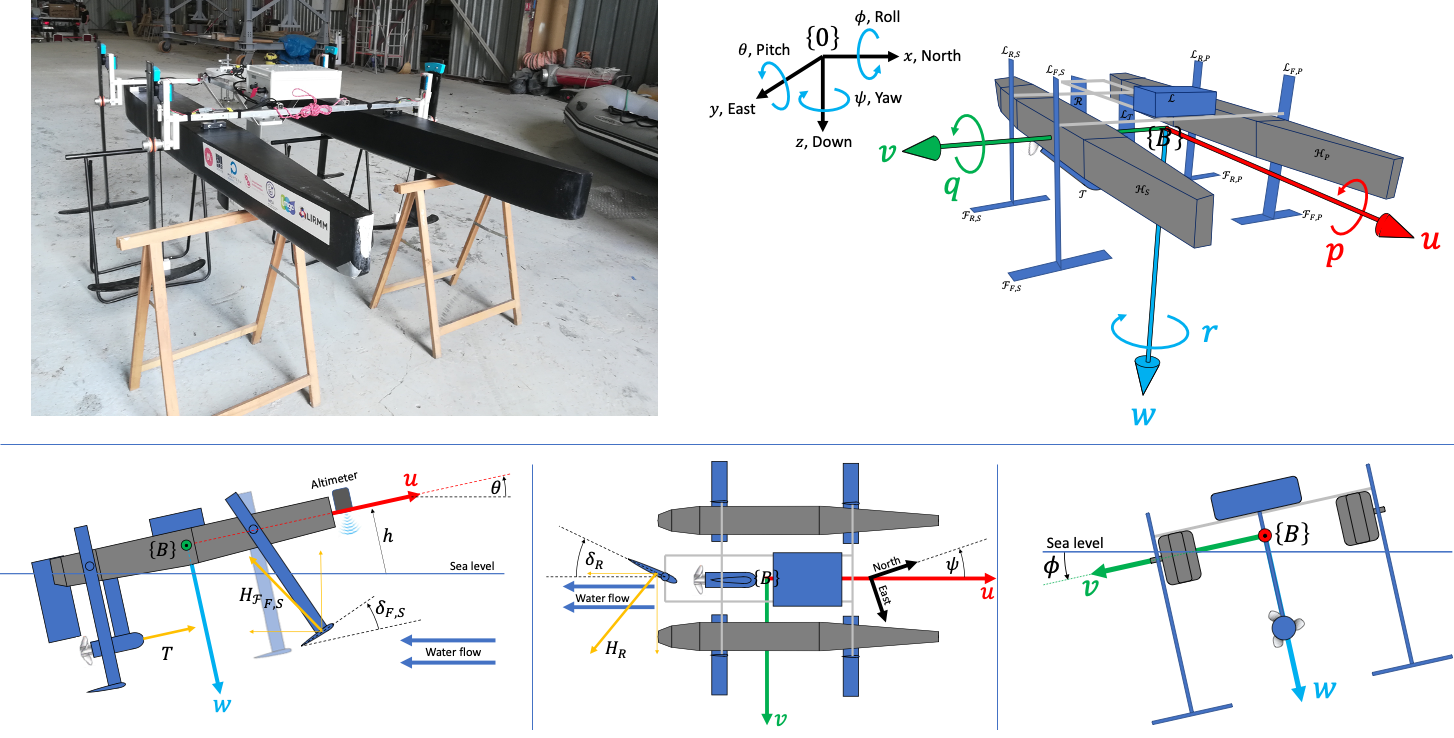
This project proposes to investigate the design and control structure of the new 4-foil electric hydrofoiler, named Black
Pearl. The novelty of our approach lies in the redundant design of the sustentation structure of the Black
Pearl: 4 independent foils to regulate 3 degrees of freedom, namely roll, pitch, and altitude above water. As
demonstrated later in this paper, this redundancy allows for a more efficient actuation allocation, thereby
reducing the occurrence of actuation saturation. Moreover, the explicit management of this redundancy
provides actuation robustness in situations where one foil is blocked at a fixed angulation.
Experiments are conducted on the Black Pearl prototype, and new guidance laws to enhance the Black Pearl's
ight are presented and tested in simulation.
AlaviMehr, J., Davis, M., Lavroff, J., Holloway, D., and Thomas, G. (2016). Response of a high-speed wavepiercing
catamaran to an active ride control system. International Journal of Maritime Engineering,
Transation of RINA, 158.
Day, S., Cocard, M., and Troll, M. (2019). Experimental measurement and simplified prediction of tfoil
performance for monohull dinghies. In Proceedings of 23rd Chesapeake sailong yacht symposium,
Anapolis, Maryland.
Esteban, S., de la Cruz, J., Giron-Sierra, J., de Andres, B., Diaz, J., and Aranda, J. (2000). Fast ferry
vertical accelerations reduction with active flaps and t-foil. IFAC Proceedings Volumes, 33(21):227-232.
5th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC 2000), Aalborg, Denmark, 23-25 August 2000.
Hörberg, A. and Lundgren, F. (2023). Flight control system for a hydrofoil boat: Controller development by
performance analysis in the unity simulation environment. In Master's thesis of the Chalmers University
of Technology, Gothenburg, Sweden.
Lopes, D., Vaz, G., de Campos, J. F., and Sarmento, A. (2023). Modelling of oscillating foil propulsors in
waves. Ocean Engineering, 268:113316.
Monsonnec, F. (2020). Eric tabarly et les hydrofoils, genese d'une idee. Voiles et Voilier, 594.
Nakamura, Y., Hanafusa, H., and Yoshikawa, T. (1987). Task-priority based redundancy control of robot
manipulators. The International Journal of Robotics Research, 6(2):3-15.
Rayhan, F. A., Fadillah, S., Akbar, A. K., Putra, B. A., Marasabessy, A., and Rizal, R. (2023). Numerical
study of resistance trimaran unmanned surface vehicle based on naca foil. CFD Letters, 15(11):36-47.
Ropars, B., Lapierre, L., Lasbouygues, A., Andreu, D., and Zapata, R. (2018). Redundant actuation system
of an underwater vehicle. Ocean Engineering, 151:276-289.
Sang-Hyun, K. and Hiroyuki, Y. (2004). An experimental study of the longitudinal motion control of a fully
submerged hydrofoil model in following seas. Ocean Engineering, 31.
Shen, H., Xiao, Q., Zhou, J., Su, Y., and Bi, X. (2022). Design of hydrofoil for the resistance improvement
of planing boat based on cfd technology. Ocean Engineering, 255.
Suastika, K., Nadapdap, G. E., Aliffrananda, M. H. N., Hermawan, Y. A., Utama, I. K. A. P., and Aryawan,
W. D. (2022). Resistance analysis of a hydrofoil supported watercraft (hysuwac): A case study. CFD
Letters, 14(1):87-98.
Zong, Z., Sun, Y., and Jiang, Y. (2019). Experimental study of controlled t-foil for vertical acceleration
reduction of a trimaran. Journal of Marine Science and Technology, 24.