|
|
|
|
|
|
|
|
|
|
Contexte. Ces dernières décennies, la robotique mobile s'est développée largement dans des milieux structurés et déjà cartographiés. Dans des environnements inconnus et non-structurés, comme les planètes lointaines, les volcans, des grottes profondes, des zones irradiées, des veines karstiques, les bâtiments en feu, les fonds marins, la robotique change de nature. Non seulement, elle devient indispensable car l'humain peut difficilement intervenir de façon sécurisée, mais souvent l'opérateur ne peut plus aider par téléopération les robots. Ces derniers doivent alors posséder un maximum d'autonomie et d'intelligence afin de pouvoir accomplir une mission. On parle alors de robotique exploratoire car le robot doit cartographier son environnement, prendre des décisions, se localiser et être capable de revenir.
Objectifs. La nouvelle équipe Robex cherche à développer les outils académiques afin concevoir des algorithmes intelligents permettant à des robots d'accomplir une mission d'exploration de façon autonome. Sous certaines hypothèses sur l'environnement et la dynamique du robot, nous nous intéressons à garantir certaines propriétés comme l'évitement d'une zone interdite, le respect de contraintes sur l'état du système, l'intégrité de la localisation et la capacité de revenir au point de départ. Nous nous efforçons de prendre en compte avec rigueur tout type d'incertitude, d'obtenir des solutions théoriquement élégantes, et de faire des validations expérimentales convaincantes.
Outils académiques. Parmi les outils académiques que nous voulons promouvoir, nous focalisons sur les outils ensemblistes, l'interprétation abstraites, la commande non-linéaire des robots et le filtrage bayésien. Nous cherchons à représenter et à propager les incertitudes de la façon la plus rigoureuse possible sans faire d'approximations non maîtrisées, comme celles induites par la linéarisation, la quantification ou la discrétisation. Les variables incertaines peuvent être la carte de l'environnement, les données capteur, la trajectoire des robots, les prises de décision passées ou futures, la dynamique des robots et les interventions humaines. La modélisation de ces différents types d'incertitude demande une réflexion et l'élaboration d'outils capables de répondre à nos objectifs.
Expérimentations. Un des principes de notre équipe est que chaque expérimentation doit être une preuve de concept associé à un résultat théorique original. De même tous les développements théoriques devront aller jusqu'à une expérimentation robotique. Nous cherchons à nous limiter à des problèmes d'exploration par des robots en cherchant à garantir certaines propriétés dictées par un cahier des charges, comme la non intrusion dans une zone interdite ou bien la capacité à revenir à la position initiale.
Exemples.
Nous donnons ici quelques exemples illustratifs de problèmes que nous chercherons à traiter avec nos approches.
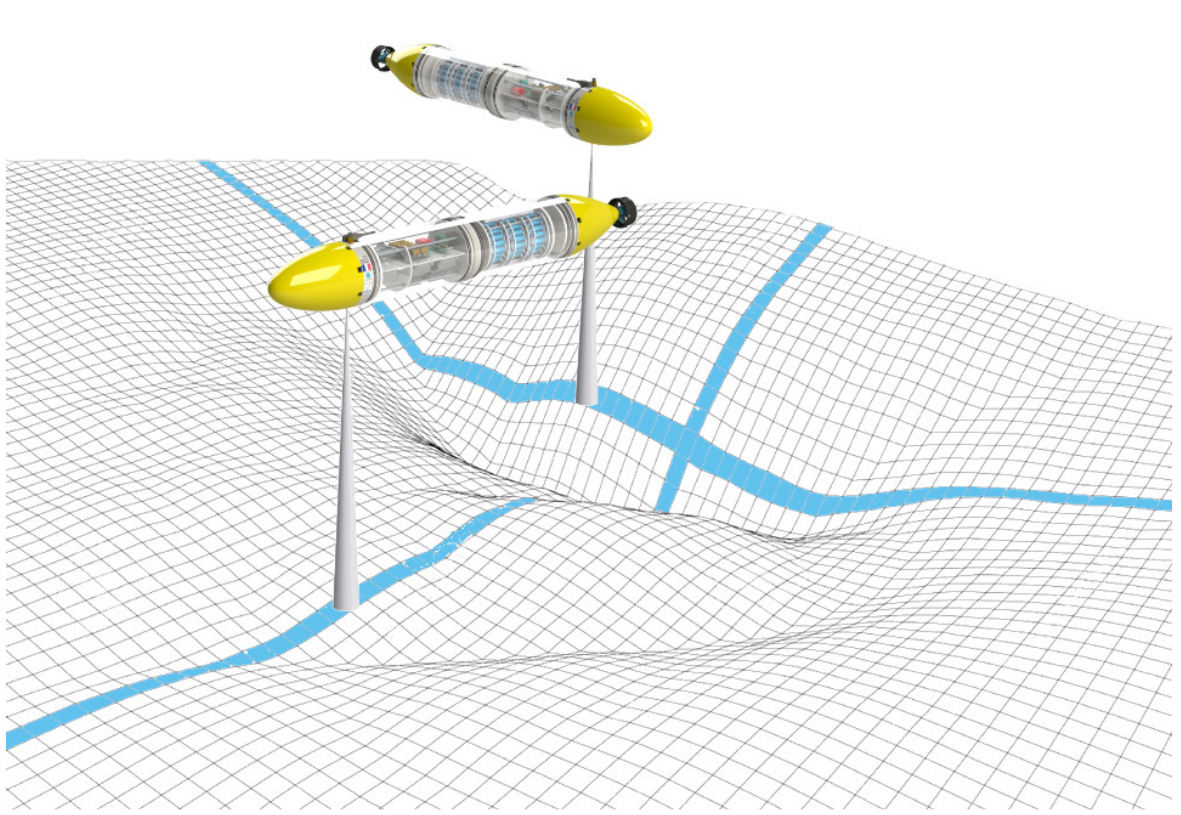
1. Concevoir et réaliser un robot sous marin capable d'explorer son environnement seul, sans refaire surface pour
capter le GPS, avec un sonar comme unique capteur extéroceptif.
2. Réaliser dans un monde sous marin un suivi d'isobath dans un but d'explorer et revenir, avec un simple écho-sondeur.
3. Réaliser la capture d'un robot par plusieurs robots dans un environnement incertain et non structuré.
4. Concevoir des robots dérivants capables de faire de très longues distances dans l'océan en utilisant les courants
marins comme moyen de propulsion.
Collaborations.
Entreprises :
Forssea Robotics,
RT-sys,
Sirehna,
Exail,
Kopadia,
CT2MC,
Subsea-Tech,
Pixel sur mer,
Arkeocean,
IM-solution,
Seaber,
Thales Underwater Systems
Institutions : DGA, DRASSM, Ifremer, EDF, Région Bretagne, Shom.
Laboratoires. LIRMM, IRISA, Polytechnique, LS2N.
GDR : GDR Macs et GDR robotique.
Dans le Lab-STICC.
Robex est une des équipes du Lab-STICC.
Elle fait partie du pole IA&O (Intelligence Artificielle et Océan) avec 2 autres équipes :
- MAHO, resp. P. Bosser, (Méthodes Appliquées pour l’Hydrographie et l’Océanographie) se focalise sur la compréhension de la
physique de la mesure pour son exploitation, en particulier en hydrographie et en océanographie.
- OSE, resp. A. Benzinou (Observations Signal et Environnement), se positionne dans entre la recherche
méthodologique en traitement du signal et en intelligence artificielle dans un environnement marin.
Le Lab-STICC.
Le Lab-STICC se définit par son projet scientifique qui se résume à la chaîne de traitement qui permet d'aller du capteur
jusqu'à la connaissance et la prise de décision.
La coloration marine y est déterminante du fait de son emplacement (Brest, Quimper, Lorient et Vannes), des entreprises avec lesquelles
il collabore et des écoles tutelles (ENSTA-Bretagne, IMTA, UBO).
Le lab-STICC se distingue dans différents domaines comme les communications numériques,
la robotique sous-marine, l'intelligence artificielle, le traitement d'image marine vidéo/radar/sonar et la cyber-sécurité.
Le laboratoire est également reconnu pour ses nombreux accords avec des universités étrangères comme: Adélaïde, Cranfield, Delhi, Bombay, Bangalore, Mexico.
Le Lab-STICC est composé de plus de 500 chercheurs et est structuré en pôles puis en équipes.
Sociétés savantes.
Pour les doctorants et les permanents, il est utile de recevoir les annonces nationales sur les événements,
les conférences, les postdocs, les prix, les moocs, les postes, etc
Pour cela, vous pouvez adhérer à des sociétés savantes. Pour Robex, il y a :
La SAGIP : http://www.sagip.org/fr
Le GDR Robotique https://www.gdr-robotique.org/
Pour ceux qui font des intervalles, vous pouvez adhérer à la liste
Reliable Computing : https://lists.louisiana.edu/mailman/listinfo/reliable_computing

Professeur ENSTA en robotique sous marine
lionel.lapierre@ensta-bretagne.fr

Professeur in robotics
lucjaulin@gmail.com
tél. 06 82 99 00 41
Professor UBO/ENSTA/LabSTICC in the domain of ocean robotics. He works on interval methods since 1992 and he applies them in localization, control and mapping of ocean robots.


Professor in robotics
benoit.zerr@ensta-bretagne.fr
Professor de l'ENSTA-Bretagne/LabSTICC dans le domaine de la robotique marine. Il travaille sur les groupes de robots.

Lecturer in robotics
fabrice.le_bars@ensta-bretagne.fr
Lecturer at l'ENSTA-Bretagne/LabSTICC in marine robotics. He works on sailboat robots and on the localisation of underwater robots using interval analysis.

Lecturer in robotics
simon.rohou@ensta-bretagne.fr
Lecturer at l'ENSTA-Bretagne/LabSTICC in marine robotics.
He works localization and SLAM for underwater robots using tube programming.
He is at the head of the working group 'Marine Robotics of the GDR Robotique

Lecturer in robotics
damien.masse@univ-brest.fr
Lecturer at UBO/LabSTICC in computer science. He studies abstract interpretation and viability theory for proving safety properties of robots.

Engineer in robotics
alain.bertholom@ensta-bretagne.fr
Engineer l'ENSTA-Bretagne/LabSTICC in marine robotics. He works on localization and acoustic methods for underwater vehicles.

Chargé de recherche CNRS
christophe.viel@gadz.org
He works in underwater robotics, mainly with ROVs, taking the cables into account.

Cartographie et localisation simultanées avec données aberrantes à l'aide du calcul par intervalles
Encadré par Fabrice Le Bars et Luc Jaulin.
![]()

Accélération matérielle du calcul par intervalles et son application à la robotique mobile.
Encadré par Théotime Bollengier, Jean-Christophe Le Lann et Luc Jaulin.
![]()

Méthodes formelles pour la robotique mobile.
Encadré par Eric Goubault, Sylvie Putot et Luc Jaulin.
![]()

Doctorant en robotique sous-marine sur la validation a priori de missions autonomes.
Encadré par
Damien Massé
et Luc Jaulin
![]()

Doctorant en robotique marine.
Encadré par
Simon Rohou
Fabrice Le Bars
Fabien Novella
et Luc Jaulin
![]()

Doctorant en robotique karstique.
Encadré par
Simon Rohou
Fabrice Le Bars
Lionel Lapierre
et Luc Jaulin
![]()

Doctorant en robotique sous-marine sur l'exploration karstique.
Encadré par Lionel Lapierre, Luc Jaulin, Fabrice Le Bars.
![]()

Doctorant sur le docking sous-marin.
Encadré par Lionel Lapierre et Thomas Le Mézo.
![]()

Doctorant sur la manipulation d'objets sous-marin par une flotte de robots via une structure de tensegrité sur-contrainte.
Encadré par Lionel Lapierre et Christophe Viel.
![]()

Localisation d'une cible mobile de façon passive à partir de plusieurs drones non synchronisés par une approche ensembliste.
Encadré par Lionel Lapierre et Luc jaulin.
![]()

Post-doc / ingénieur de recherche en propagation acoustique pour la localisation de source BF (PROTEUS)

Post-doc sur la commande non-linéaire de robots marins

Post-doc sur les jumeaux numériques pour les robots sous-marins

Etude et développement de solutions de relocalisation d’objets sous-marins par des véhicules sous-marins hétérogènes
![]()

Safe Localization and Control of a Deported Underwater Sensor
![]()

Post Doctorant en robotique sur la reconfigurabilité des robots sous-marins

Ancien doctorant en robotique avec Kopadia sur l'exploration sous marine par un groupe de robots.
Encadré par Simon Rohou et Luc Jaulin
![]()

Ingénieur de recherche en traitement d'images (classification, segmentation) par apprentissage automatique dans le cadre du projet Narval

Ingénieur de recherche en perception sous-marine dans le cadre du projet Narval

Ingénieur de recherche dans le domaine de la Robotique dans le projet NEMOSENS

Ingénieur de recherche dans le domaine de la Robotique dans le projet NEMOSENS

Ingénieur de recherche, en photogrammétrie sous-marine et simulation d'images sonar sur le projet Narval

Precise characterization of acoustic backscatter levels to improve complex seabed identification.
Encadrée par Benoît Zerr et Philippe Blondel.
![]()

Ancien doctorant qui a soutenu le 31 mai 2023 sur un moteur de dialogue multimodal adaptatif dans un système multi-capteurs et multi-actionneurs appliqué à une plateforme robotique

Invited researcher
Ancien chercheur invité pour une année. Andreas Rauh was born in Munich, Germany, on March 25, 1977. He is now professor at the university of Oldenbourg, Gernany.

Ancien doctorant en thèse Cifre avec l'entreprise FORSSEA.
Encadré par Luc Jaulin
![]()

Ancienne doctorante en robotique sous-marine sur la validation en navigation autonome.
Encadrée par
Sylvie Putot
Eric Goubault
et Luc Jaulin
![]()
Hybrid Probabilistic- and Set-Membership-based Coarse and Refined (HyPaSCoRe) Localization.
Encadré par Bernardo Wagner et Luc Jaulin.
![]()

Anciennement doctorant la commande des robots sous-marins dérivants dans les courants océaniques
Encadré par Luc Jaulin et Benoît Zerr
![]()

Anciennement doctorant en robotique sur la communication avec relais intermédiaires navals autonomes.
Encadré par Andreas Arnold, Pierre-Jean Bouvet et Luc Jaulin.
![]()

Anciennement en Post-doc en vision avec Pixel sur mer pour la détection d'obstacle. Actuellement McF à l'IMTA, Brest.

Anciennement doctorant en robotique sur la preuve de stabilité pour un groupe de drones sous-marins en formation.
Encadré par Christophe Viel et Luc Jaulin.
![]()

Anciennement post-doc sur la caractérisation de la projection d'ensembles en utilisant le calcul par intervalles
The seminar of the Robex can be found here:
![]()
We organize every year the Robex Day.
Robex day 1 : ![]()
Robex day 2 : ![]()
Robex day 3 : ![]()
Robex day 4 : ![]()
![]() Organisation de la journée "Robotique et patrimoine"
Organisation de la journée "Robotique et patrimoine"
le 6 février 2020, avec F. Plumet, V. Creuze et E.M. Mouaddib à Paris, Jussieu.
Tutorial: constraint programming for mobile robotics, During the ICRA 2020 Conference (Paris, France); 8th June - 5th July 2020; Organizers: Simon Rohou, Luc Jaulin, Benoît Desrochers, Raphael Voges
![]() L. Jaulin, Ocean exploration with underwater robots,
MOQESM'2020 , Brest.
L. Jaulin, Ocean exploration with underwater robots,
MOQESM'2020 , Brest.
Tutorial: constraint programming for mobile robotics, during the IROS 2020 Conference (Las Vegas), October 2020; Organizers: Simon Rohou, Luc Jaulin, Benoît Desrochers, Raphael Voges