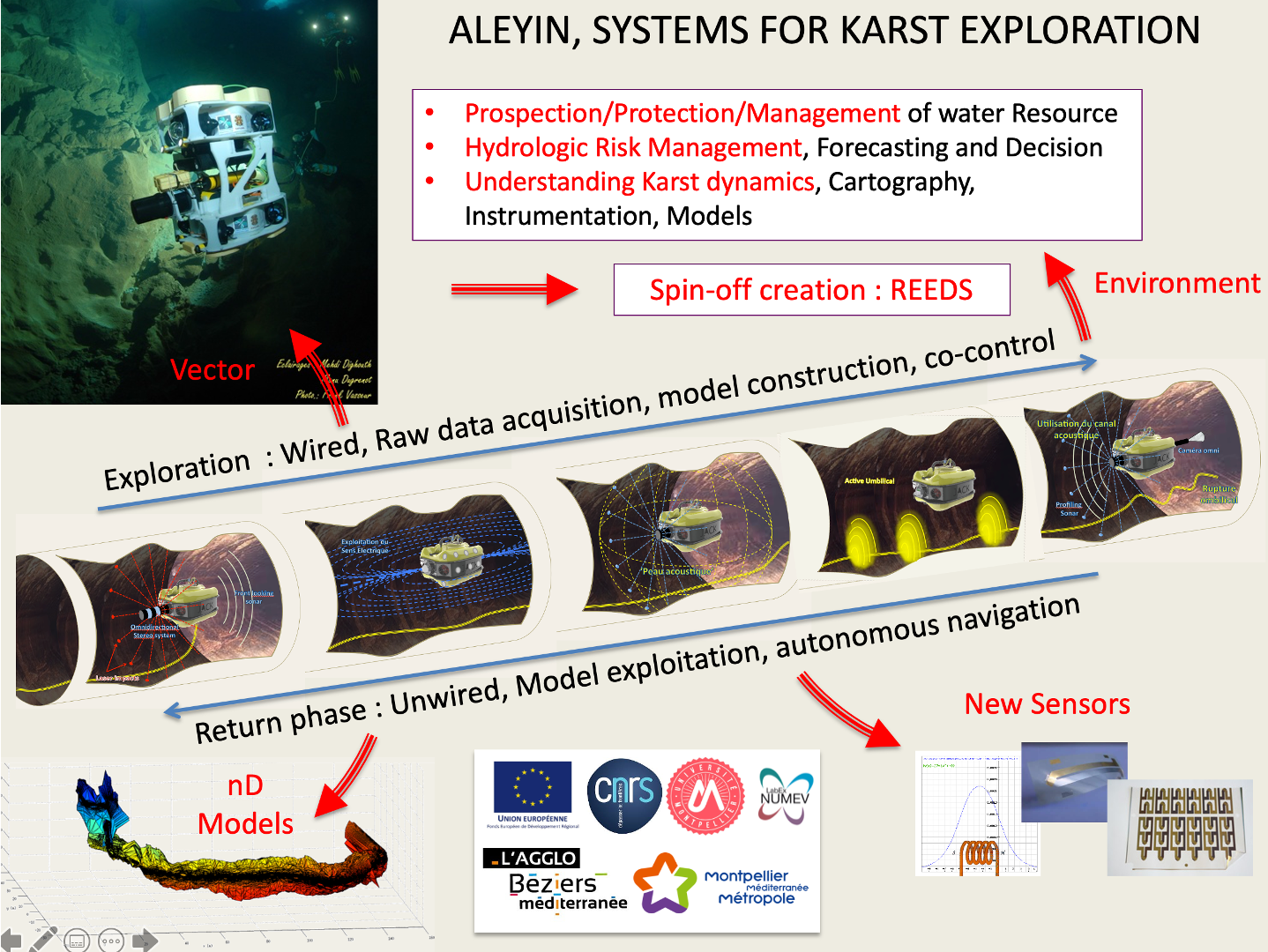
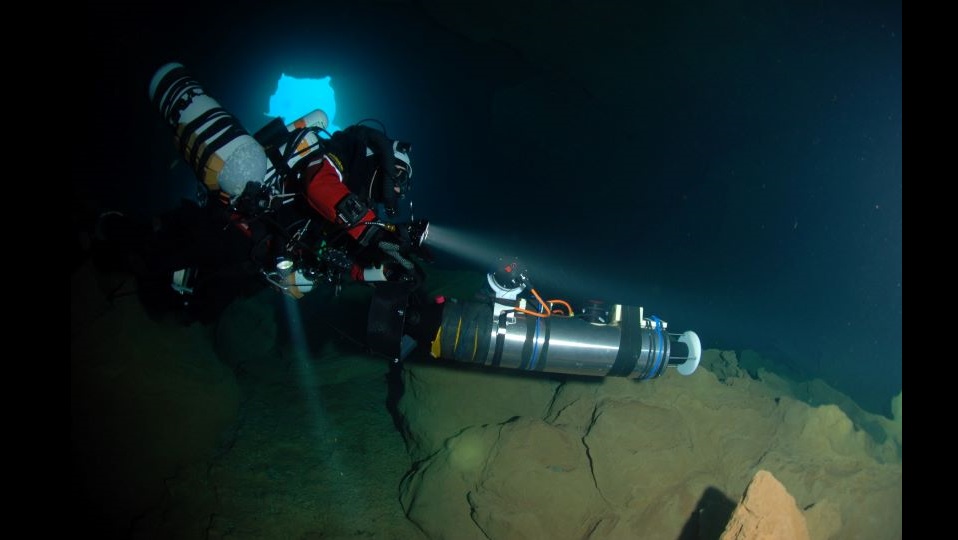
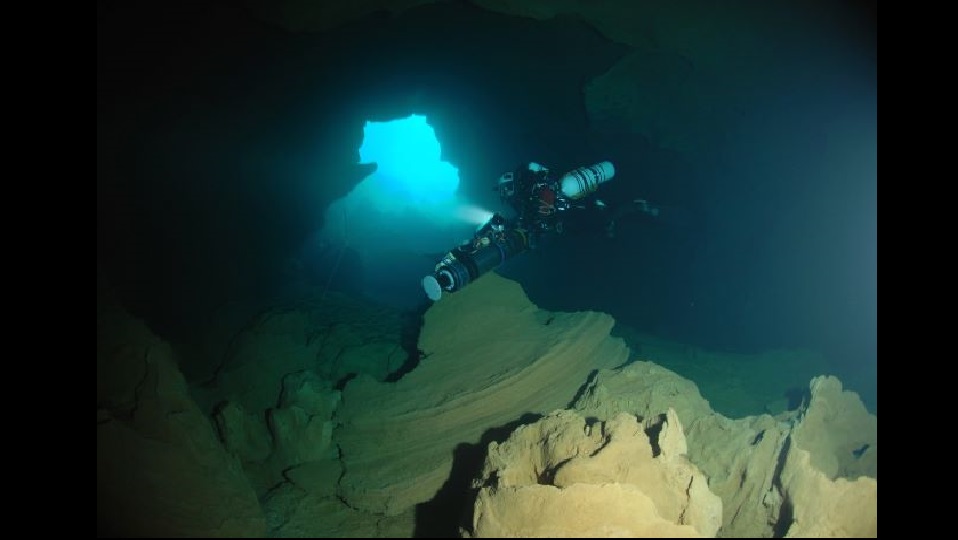
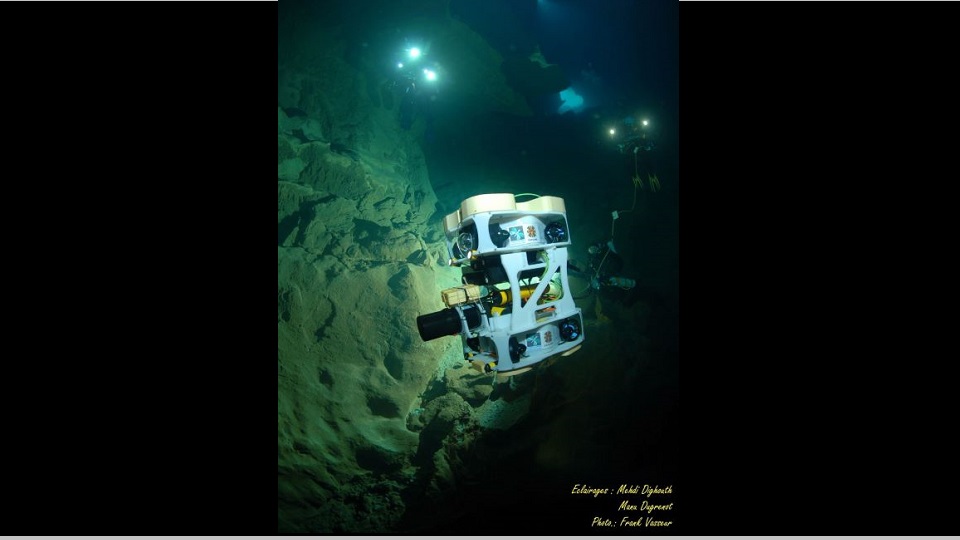
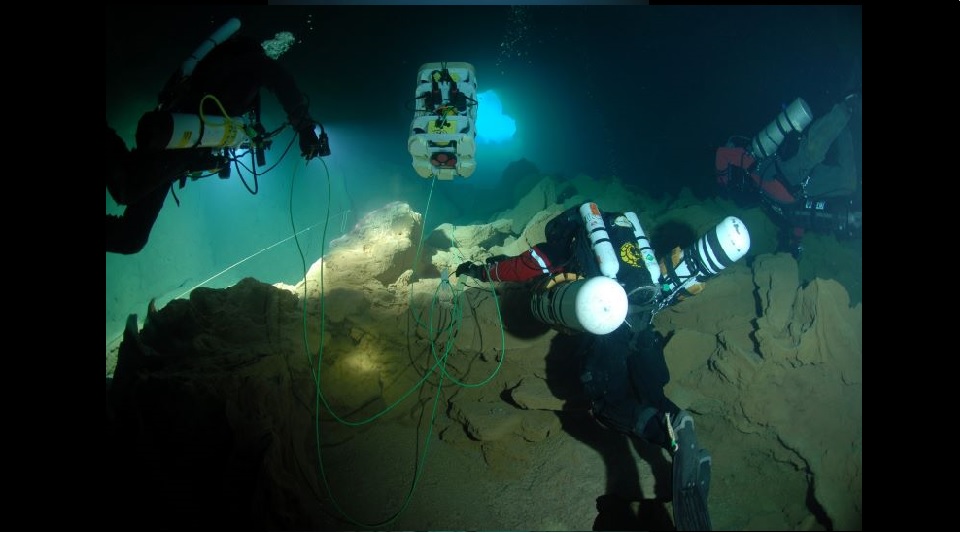
Research projects : Robots for Karst Exploration
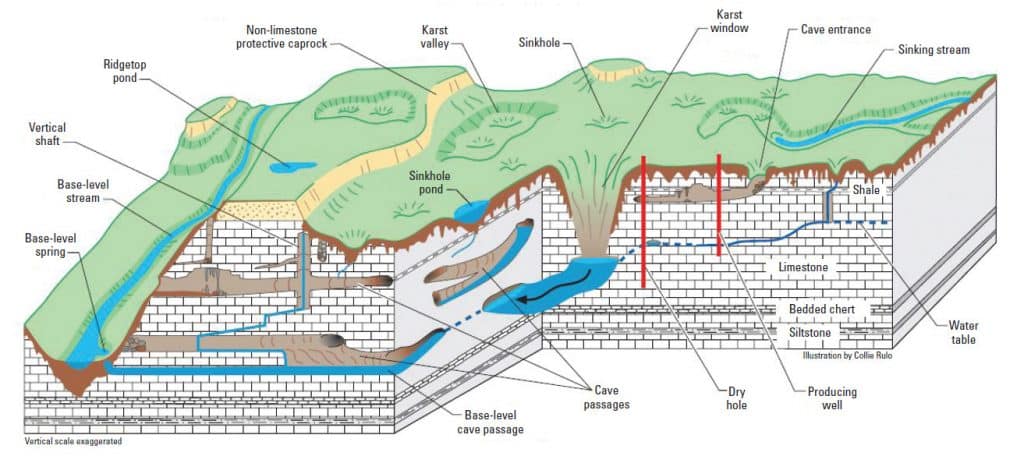
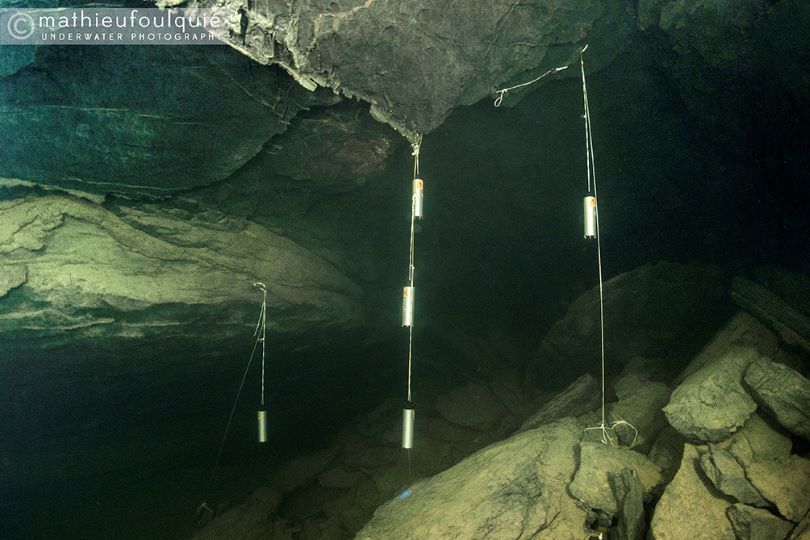
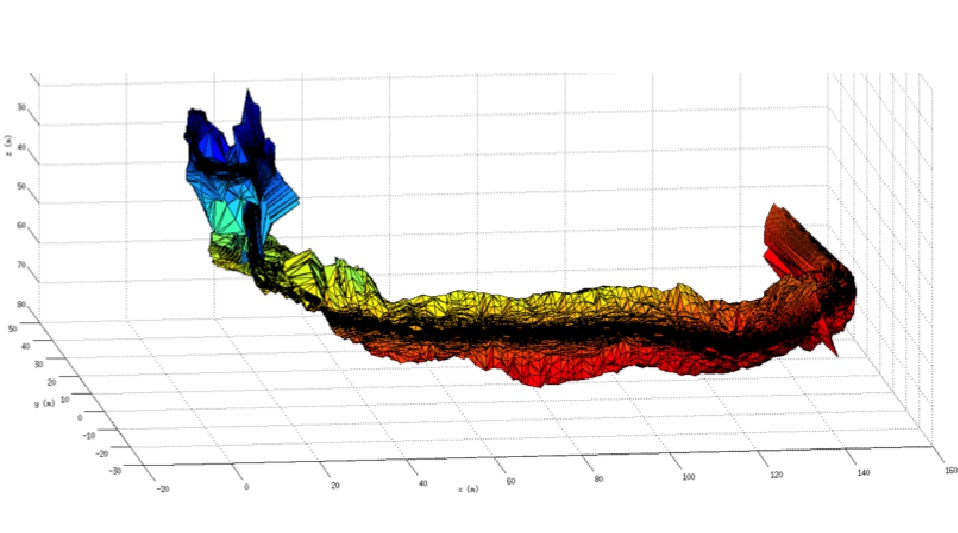
Conception and experimentation of robotic systems able to explore underground, subaquatic confined environment, autonomously.










This research initiative has been supported and funded by :