




From June 5 to 7, the 7th ACNDC* conference of the International Federation of Automatic Control was held at Imperial College (London). On this occasion, the young author prize was awarded to Morgan Louedec, a Lab-STICC / ENSTA Bretagne PhD student.

The research work presented at the conference by Morgan Louédec focuses on "the outer envelope of nonlinear applications with degenerate ellipsoids".
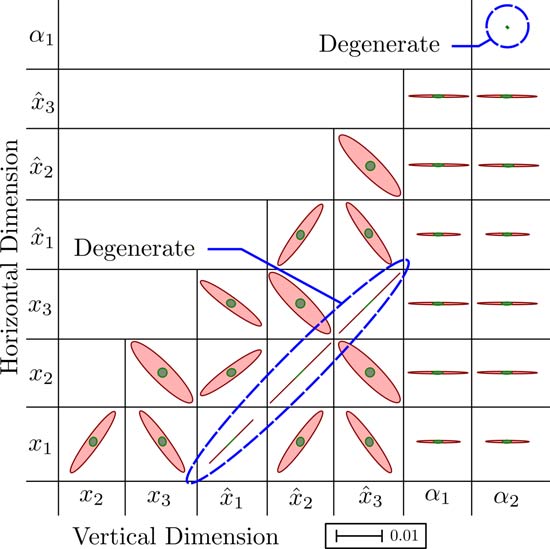
In this paper, I present part of the research work carried out for my thesis in underwater robotics, which focuses on the stability of autonomous robot fleets. I study this stability using holistic mathematical numerical tools. This paper presents an improvement to a mathematical tool that uses interval analysis to calculate ellipsoidal envelopes that can be used to prove the theoretical stability of robots.
The interval analysis on which is based the young researcher's work is aimed at studying complex systems with many variables, such as packs of robots. In the paper presented by Morgan at this conference, he looked at special cases not covered in the original method, based on degenerate ellipsoids.
I'm very proud to have received this award, as IFAC conferences are highly regarded in the international automatic control community.
Morgan is to submit his thesis in the autumn of 2024. He would then like to pursue an academic career in the marine robotics field.
- Thesis supervision: Luc Jaulin and Christophe Viel.
- Funding: The Brittany Region and the Defense Innovation Agency (Agence de l’Innovation de Défense).
* 7th IFAC Conference on Analysis and Control of Nonlinear Dynamics and Chaos














