Du 5 au 7 juin se déroulait la 7e conférence ACNDC*de la Fédération internationale du contrôle automatique à l’Imperial College (Londres). A cette occasion, le prix du jeune auteur a été remis à Morgan Louedec, Doctorant Lab-STICC / ENSTA Bretagne.

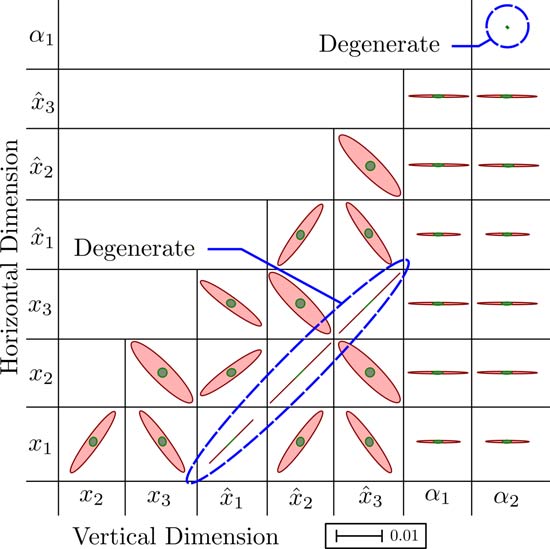
Les travaux de recherche présentés lors de la conférence par Morgan Louédec porte sur « l’enveloppe extérieure d’applications non-linéaires avec des ellipsoïdes dégénérées ».
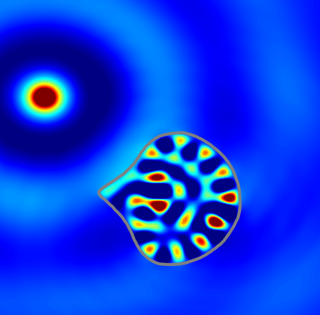
Dans ce papier, je présente une partie des travaux de recherche menés dans le cadre de ma thèse en robotique sous-marine qui porte sur la stabilité des flottes de robots autonomes. J'étudie cette stabilité via des outils numériques mathématiques ensemblistes. Ce papier présente une amélioration d'un outil mathématique qui utilise l'analyse par intervalle pour calculer des enveloppes ellipsoïdales qui permettent de prouver la stabilité théorique des robots ».
L’analyse par intervalle sur laquelle s’appuie les travaux du jeune chercheur vise à étudier des systèmes complexes comprenant de nombreuses variables tels que les meutes de robots. Dans le papier présenté par Morgan lors de cette conférence, il s’est intéressé à des cas particuliers non couverts dans la méthode originale en s’appuyant sur les ellipsoïdes dégénérées.
Je suis très fier d'avoir reçu ce prix car les conférences IFAC sont très réputées dans la communauté internationale de l'automatique.
Morgan soutiendra sa thèse au cours de l’automne 2024. Il souhaite ensuite poursuivre une carrière académique dans le domaine de la robotique marine.
- Encadrement de thèse : Luc Jaulin et Christophe Viel.
- Financement : Région Bretagne et l’Agence de l’Innovation de Défense.
* 7th IFAC Conference on Analysis and Control of Nonlinear Dynamics and Chaos